15861139266
15861139266
面阵相机(Area Scan Camera)
工作原理
传感器结构:利用二维像素阵列,如CMOS或CCD,能在一次曝光中获取完整的二维图像。
成像方式:通过快门或全局/卷帘曝光,可直接捕捉静态或动态场景的全幅图像。
适用场景:适合拍摄静止或低速运动的物体,高速运动物体可能会出现图像拖影。
性能特点
分辨率:由像素的行列数决定,如4096×3000,满足常规细节需求。
帧率:受限于传感器读出速度,高速相机可达数千帧每秒。
灵活性:支持动态场景拍摄,无需与物体运动同步。
优点
实时性:单次成像即可获得完整画面,适用于实时监控和视频录制。
通用性:适用于复杂场景,如多目标和随机运动的物体。
系统简单:无需与运动平台同步,集成成本低。
缺点
高速限制:高速运动物体可能产生模糊(需高帧率补偿)。
分辨率瓶颈:超高分辨率需求下,传感器尺寸和成本显著增加。
典型应用
安防监控:实时视频流捕捉,如交通摄像头和人脸识别。
医疗影像:X光片和内窥镜成像。
消费电子:手机摄影和无人机航拍。
工业检测:电子元件外观检测和食品包装完整性检查。
线阵相机(Line Scan Camera)
工作原理
传感器结构:拥有单行或几行像素,如1×8192,需与物体相对运动逐行扫描以合成图像。
成像方式:依赖连续扫描,如传送带移动或相机平移,逐行拼接成二维图像。
适用场景:适合连续运动物体的高分辨率成像,需严格同步的运动控制。
性能特点
分辨率:行方向像素数量极高,如16K,满足大尺寸物体的精细检测。
行频(Line Rate):关键性能指标,可达数十kHz,如70kHz。
优点
高分辨率:行方向可实现极高分辨率,适合大尺寸物体的精细检测。
高精度:逐行扫描可实现高精度测量。
缺点
同步要求:需与物体运动同步,对运动控制要求高。
灵活性限制:不适合静态或低速运动的物体成像。
典型应用
半导体检测:晶圆表面缺陷检测。
条码扫描:条形码和二维码读取。
印刷检测:印刷质量监控。
高动态范围:通常优于面阵相机,适用于明暗对比强烈的场景。
优点
超高分辨率:适用于大面积物体(如PCB板、液晶屏)的无缝成像。
无运动模糊:逐行扫描能匹配高速运动,避免拖影。优化光源应用:结合线性光源使用,可实现更均匀的照明效果。
缺点
系统复杂性高:需与运动平台实现精确同步,通常通过编码器进行控制,集成过程较为复杂。
数据处理负担重:需实时处理和拼接行数据,对软件算法的精度要求较高。
静态场景适用性有限:无法用于拍摄静止物体,通常需要物体强制运动或借助扫描装置。
典型应用领域
工业检测:
印刷品缺陷检测,例如标签和钞票的瑕疵检测。
平板显示面板(如OLED和LCD)的像素级质量检验。
连续材料检测,如金属箔、薄膜和纸张的质量监控。
遥感与测绘:
卫星或航空扫描成像,用于地形测绘等。
文档数字化:
高速扫描仪和古籍数字化处理。
生物识别:
指纹采集和DNA芯片扫描。
关键对比与选择建议
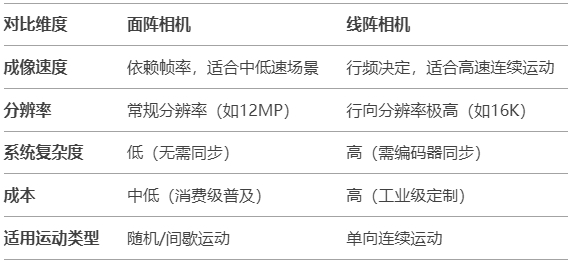
选型指南
当需求实时处理、捕捉静态或非规律运动物体,或系统集成面临复杂度限制时,推荐选择面阵相机。
线阵相机的适用场景
对于物体快速连续运动、对超高分辨率有要求或需实现大范围无缝成像的场合,如印刷和玻璃制造行业,线阵相机是最合适的选择。
技术发展动态
技术融合:面阵相机凭借其超过1000帧每秒的帧率,开始涉足一些线阵相机的应用领域。此外,面阵相机通过使用多行传感器,提高了其应用范围的可变性。
智能集成:面阵相机和线阵相机均开始与AI算法结合(如实时缺陷分类),这显著提升了检测效率。
三维成像拓展:线阵相机与激光三角测量技术结合,用于执行高速的三维轮廓扫描,例如轮胎检测。
总结
面阵相机与线阵相机的选择应考虑分辨率、速度、物体运动特性及成本等因素。面阵相机以其通用性适用于动态场景;而线阵相机在高速、高精度工业检测领域具有不可替代的地位。在实际应用中,需全面考虑光学系统、运动控制和软件算法等各方面,进行整体设计。
版权所有:大林机器视觉培训长治办事处所有 备案号:苏ICP备14016686号-6
本站关键词:长治上位机培训 长治上位机软件开发培训 长治机器视觉培训 长治上位机运动控制培训 网站标签





